









工件要求:
对需焊接的工件基本要求:
所有零件表面不得有锈渍、油污等影响焊接质量的缺陷,尺寸应与图纸相符且具有良好的一致性。
工件精度要求:
1、工件实物与工件的三维模型相近;
2、焊缝间隙小于2mm;
3、工件尺寸及一致性误差≤5mm。
4、工件表面无影响定位的毛刺;
5、 工件表面无油、绣、污物、氧化皮。
1. 机器人工作站设计准则
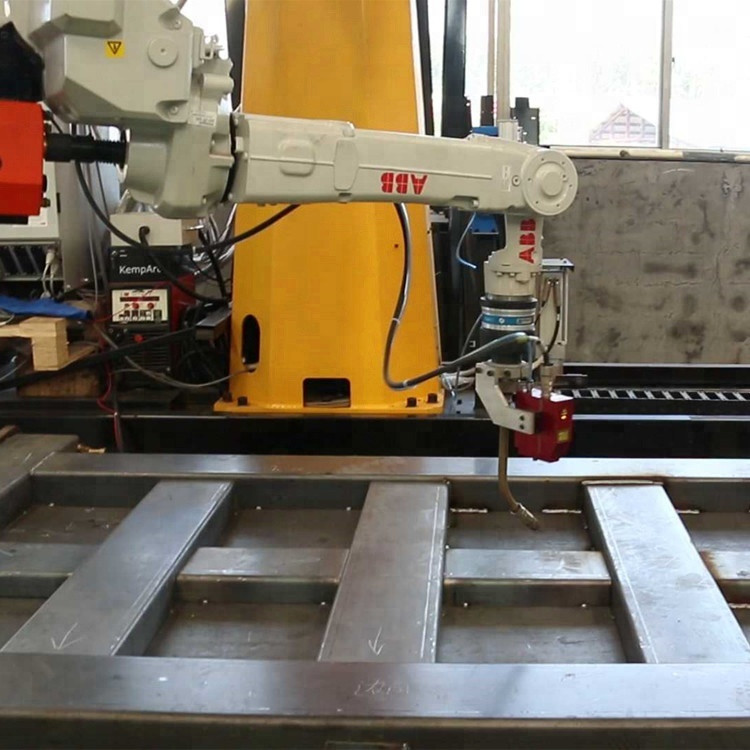
SHUIPO自卸车厢板智能焊接机器人,无需编程、无需人工精准定位,全自动化上下料平台,预变性压紧装置;在高电流接触式传感的基础上,采用加拿大赛融激光,配合ABB机器人开发了激光寻位功能,传感速度更快,精度更高。既可以换向焊接,也可以交汇焊接,无死角、全方位焊接;焊接的连续性有了新的突破,在提升产品质量的同时,能代替劳动强度过高的焊接工位和搬运工位,可提升25%的生产效率,节约1/3的人工成本;实现了近乎完美的流程化焊接。
本工作站的设计以产品工艺要求为基础,以设备的生产能力为条件,力求作业人员便捷的操作与维护,使设备的性价比达到最高。设计设备时以经济性、安全性、良好的操作性、可靠性作为我们的设计准则,并把设备的可靠性与高柔性作为我们首要追求的目标,我们更加注重选用设备的合理性以及工作站更长的使用寿命。
2. 机器人工作站焊接工艺分析
根据用户所提供的资料,通过分析工件的材质、形状特性、尺寸精度要求、焊缝长度及位置特点,结合各件的焊接工作量及机器人的工作效率,我们认为,该机器人系统采用MAG焊接工艺;为了达到高效的目的,考虑到焊缝在工件的各个面分布状况,机器人固定在移动基座上并配合压紧定位工装;进行焊接,减少焊接过程中的变形量。
考虑到工件焊缝的精度偏差因素,采用激光寻位功能,与弧压跟踪功能,纠正工件的下料及组焊偏差,实现高品质焊接。
3. 机器人系统特点
Ø 机器人焊接工作站的配置均为柔性配置,通过调整夹具即可快速适应产品变化的需要。
Ø 中空臂机器人IRB 26000ID(集成配套型)将软管束与焊接电缆分别同上臂和底座紧密集成。电源、焊丝、保护气、压缩空气等一应弧焊介质采用这种方式走线,可实现性能与能效的最优化。ABB机器人及全数字弧焊电源,实现高速信号传输,实现机器人与焊接电源同步控制。
Ø 焊接电源采用肯倍新一代的智能化MIG焊机及焊枪,保证焊接系统能够在大工作规范下持续稳定工作。
Ø 采用赛融的激光寻位,将激光倾斜一定的角度,直接扫描焊缝的位置,并配合弧压跟踪功能,焊接过程中自动调整焊枪位置,不会受到折弯件的角度不一致问题而影响到焊缝。
Ø 采用TBi的中空焊枪与防碰撞,焊枪在焊接过程中更加灵活。
Ø 应用激光器,拓展设备的视觉功能。该智能机器人采用激光跟踪扫描,对工件表面的清洁度没有附加要求;工件表面的油污和锈迹,不影响激光传感和定位;相对于焊丝和保护罩的接触传感,激光无接触检测工件的传感精度较高。
Ø 焊缝轨迹快速激光寻位;针对同类型工件无需人工编程,该机器人采用一键式启动,数据可视化。并可根据客户的不同工件类型,定制焊接功能模块。预设应用算法,减少编程。
Ø 焊缝采用弧压实时跟踪:3 mm厚度以上的板材,在焊接过程中,可自动校正焊缝,对焊接缝隙实现自动填充,保证了焊缝精度。
Ø 我公司根据自卸车厢板的焊接特点,通过更改示教盒的操作界面,操作工人按照要求输入关键的数据,简单的调整程序,便可以直接焊接,减少工人的编程时间,快速更换不同尺寸的产品,相对于其他的机器人更换不同规格的工件,需要重新编程与校正程序,更加的快捷。
序号 | 名 称 | 型号及规格 | 数量(套) | 备 注 | |
1 | 1.1 | 机器人本体 | ABB-2600-ID | 1 | ABB |
1.2 | 示教盒 | 1 | |||
1.3 | 机器人控制电缆 | 1 | |||
1.4 | 机器人控制软件 | 1 | |||
1.5 | 控制柜 | 1 | |||
1.6 | 外部轴 | 1 | |||
2 | 焊接电源 | Artsen Plus 500PR | 1 | 麦格米特 | |
3 | 送丝装置 | 与电源匹配 | 1 | 与电源匹配 | |
4 | 机器人中空焊枪 | 1 | TBi | ||
5 | 焊枪防碰撞传感器 | 1 | TBi | ||
6 | 清枪剪丝 | 1 | 国产 | ||
7 | 机架结构 | 悬臂式 | 1 | 水泊焊割 | |
8 | 机器人纵向移动(悬臂移动) | 齿轮齿条驱动 | 1 | 水泊焊割 | |
9 | 机器人纵向底座长度 | 11000mm | 水泊焊割 | ||
10 | 焊丝直径 | 1.2毫米 | |||
11 | 工件材质 | 碳钢 | |||
12 | 焊接方式 | MIG | |||
13 | 寻位方式 | 激光寻位 | 1 | 赛融 | |
14 | 焊缝跟踪方式 | 弧压跟踪 | 1 | ||
15 | 工作台 | 1 | 客户自备 | ||