





























 第1年
第1年








 无模板封头旋边机 罐体封头自动旋边
无模板封头旋边机 罐体封头自动旋边
 封头旋压机 大型容器封头成型设备
封头旋压机 大型容器封头成型设备
 大型悬挂式焊接机器人 九轴联动 全
大型悬挂式焊接机器人 九轴联动 全
 封头涨型机
封头涨型机
设备概述
1. 山东水泊焊割设备制造有限公司是专业为汽车改装、专用车生产及工程机械、造船、钢结构等行业研制专用焊割设备的高新技术企业,所提供的生产线及设备均参考了目前国内外先进技术。不仅提高了工作效率,也提高了产品的质量和美观;降低了劳动强度,节约了人力资源,降低了生产成本。是该行业客户的理想选择。
2. 本设备,是根据客户要求,综合公司长期实践经验,设计出的一套方案。
3. 需要客户提供在本工装上所生产车型的图纸。
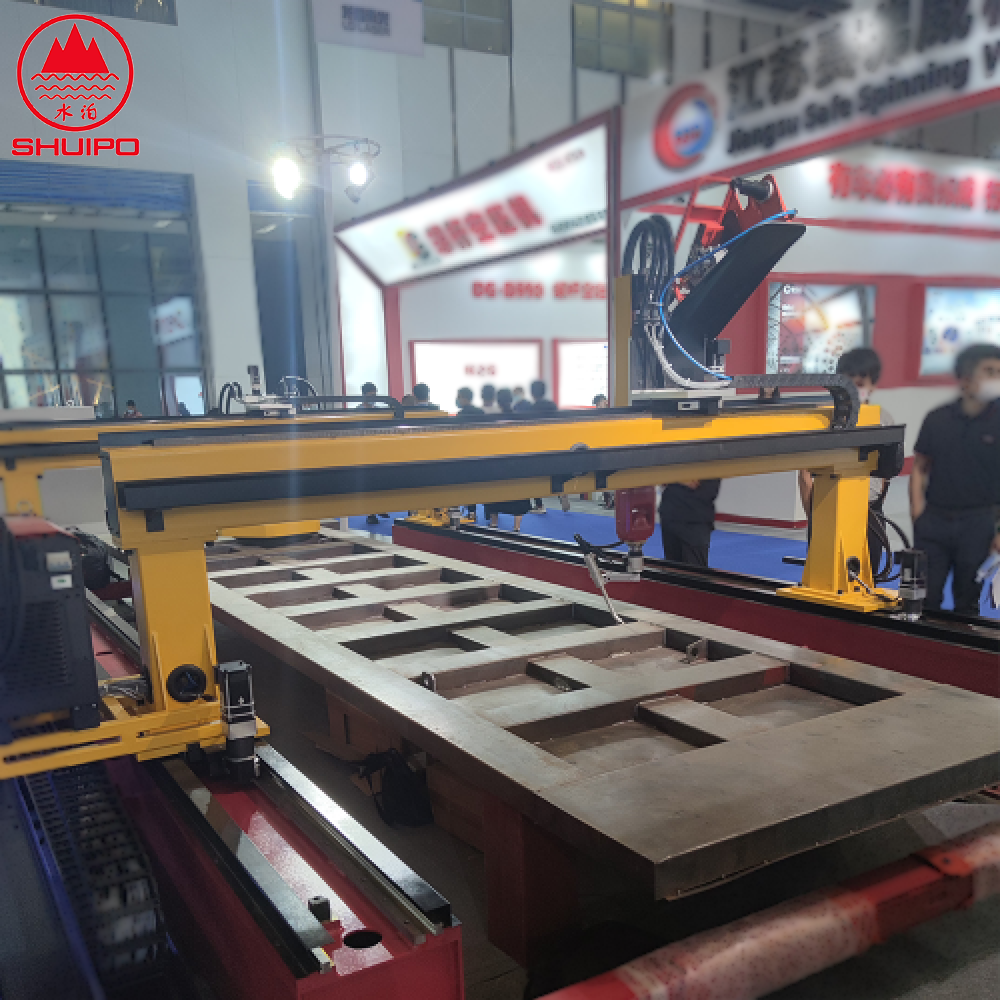
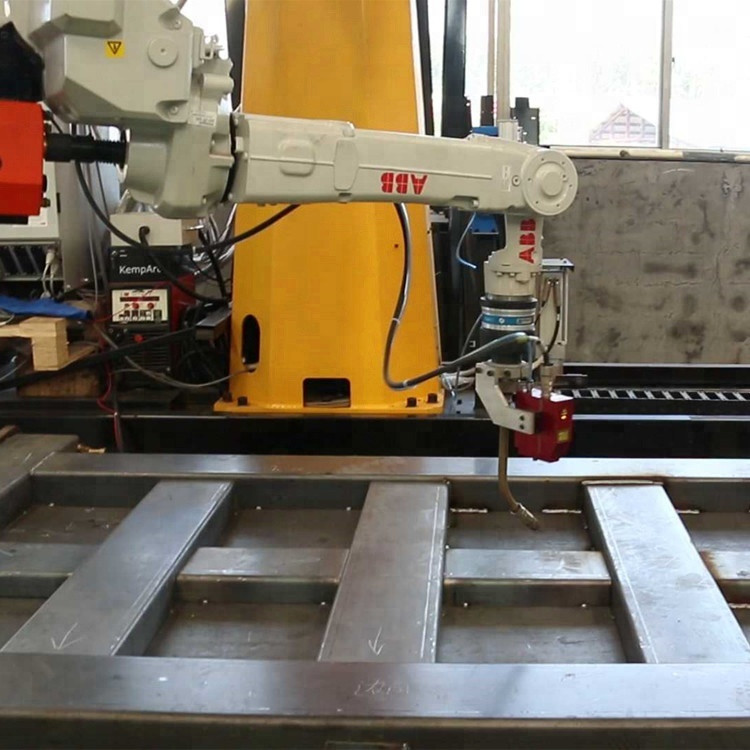
(1) 整体结构说明
整个工位采用龙门式行走方式,中间设置简易焊接工作台,。龙门架由伺服电机驱动在导轨上行走。机器人设有上下行走滑板可调节机器人的高度差。可适应焊接工件的高度差。
机器人部分的控制部分、焊机、送丝机及丝桶与机器人随动放置龙门架上。
(2) 工件要求
Ø 工件实物与所提供的图纸或三维模型一致;
Ø 同一种规格的工件,尺寸一致性误差≤1mm;
Ø 工件表面无影响定位的毛刺;
Ø 工件表面无油、绣、污物、氧化皮。
(3) 工件焊接位置
Ø 在满足焊枪空间和角度的前提下,可焊接工件所有工件焊缝。
序号 | 名 称 | 型号及规格 | 数量(套) | 品牌 | |
1 | 1.1 | 机器人本体 | KR8R2100-2 ARC HW
| 1 | 库卡 |
1.2 | 示教盒 | 1 | |||
1.3 | 机器人控制电缆 | 1 | |||
1.4 | 机器人控制软件 | 1 | |||
1.5 | 控制柜 | 1 | |||
1.6 | 原装焊缝弧压跟踪系统 | Touch Sense | 1 | ||
1.7 | 焊缝跟踪器 | Arc Sense | 1 | ||
2 | 焊接电源 | 1 | 肯倍/林肯(选配) | ||
3 | 点/线激光寻位 | 1 | 赛融(可选配) | ||
4 | 龙门导轨长度 | 根据客户工件配备 | 水泊焊割 | ||
5 | 送丝装置 | 与电源匹配 | 1 | ||
6 | 机用焊枪 | 1 | TBI | ||
7 | 焊枪防碰撞传感器 | 1 | TBI | ||
8 | 机器人外部轴数量 | 4 | 水泊焊割 | ||
9 | 保护帽传感寻位 | 1 | |||
10 | 电气控制系统 | 1 | 水泊焊割 | ||
11 | 自动清枪剪丝机构 | 1 | TBI | ||
12
| 焊丝直径 | 1.2毫米 | |||
13 | 可焊接材料 | 碳钢/铝合金 | |||
14 | 焊接方式 | MAG/MIG | |||











